เฟส 1 · ตอนนี้
ป้องกัน
ตอนเดิน — วัด + เตือน- FSR วัดแรงกด + haptic เตือน offload
- DHT11×4 — ΔT ซ้าย-ขวาในเท้าเดียว (จุดใหม่)
หน้านี้รวมเส้นทางทั้งหมดของ Rongtaw ไว้ที่เดียว — เริ่มจากตัวเครื่องเฟส 1 ที่ประกอบเสร็จแล้ว ไปจนถึงคอนเซ็ปต์เฟสถัดไปที่วางแผนไว้
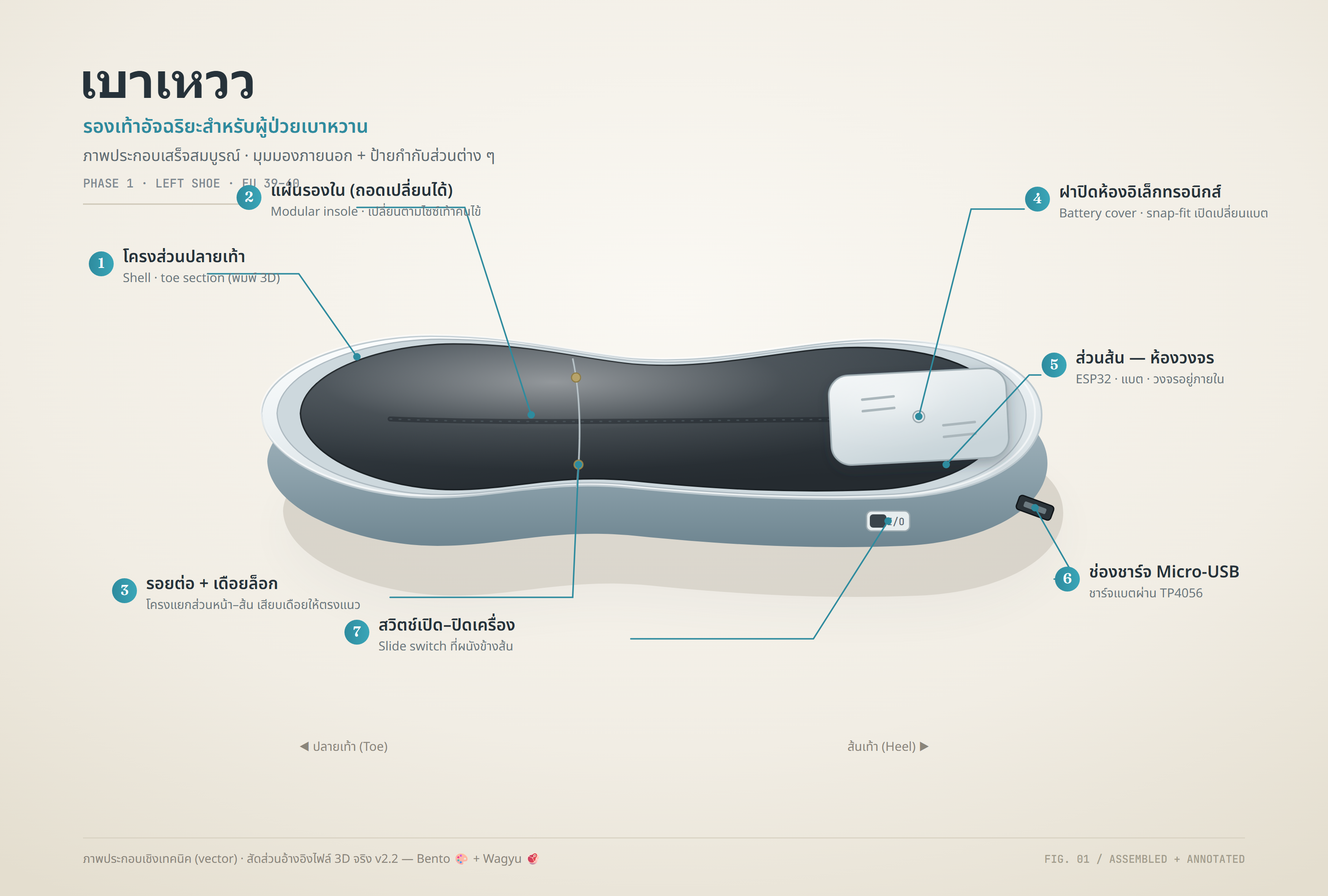
โครงนอกของรองเท้า พิมพ์ 3 มิติ แยกเป็น 2 ส่วน (ส่วนหน้า + ส่วนส้น) ประกบกันด้วยเดือยล็อกให้ตรงแนว ส่วนส้นถูกออกแบบให้กลวงเป็น “ห้องวงจร”
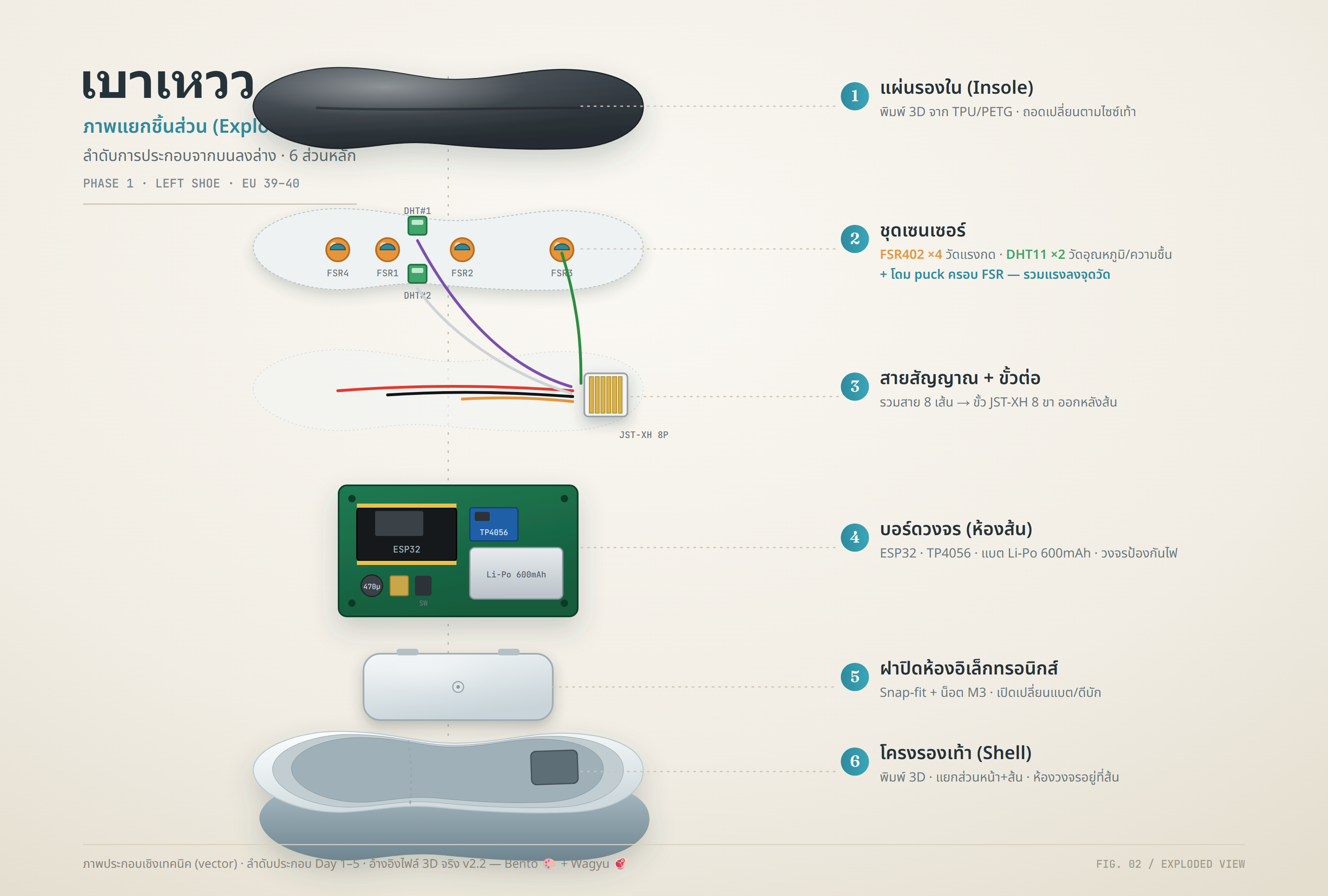
แผ่นรองที่เท้าเหยียบ พิมพ์ 3 มิติจากวัสดุยืดหยุ่น ถอดเปลี่ยนได้ตามไซซ์เท้า (โมเดล “ห้องลองรองเท้า” — คลินิกมีหลายไซซ์ให้คนไข้ลอง) ภายในฝังเซนเซอร์ไว้
เซนเซอร์วัดแรงกดฝ่าเท้า 4 จุด: ปลายเท้า (นิ้วโป้ง), หัวกระดูกฝ่าเท้า, กลางเท้า, และส้น — เป็นจุดที่เสี่ยงเกิดแผลกดทับมากที่สุดในผู้ป่วยเบาหวาน
วัดอุณหภูมิและความชื้น 2 จุดที่ขอบเท้าด้านหน้า (ด้านใน + ด้านนอก) ถ้าอุณหภูมิ 2 จุดต่างกันเกิน ~2.2°C = สัญญาณเตือนแผลกำลังจะเกิด (ก่อนเห็นด้วยตาราว 7 วัน)
รวมสายจากเซนเซอร์ทั้งหมด 8 เส้น มัดเดินออกหลังส้น ปลายเป็นขั้วต่อ JST-XH 8 ขา (มีกุญแจกันเสียบผิดด้าน) เสียบเข้ากับห้องวงจร — ถอดแผ่นรองในออกได้
สมองของระบบ: ESP32 อ่านค่าเซนเซอร์ ประมวลผล AI ประเมินความเสี่ยง แล้วส่งผ่าน Bluetooth ไปคอมพิวเตอร์ มี TP4056 ชาร์จแบต + แบต Li-Po 600mAh + วงจรป้องกันไฟกระชาก
ฝาปิดด้านบนส้น ล็อกแบบ snap-fit เสริมน็อต M3 เปิดออกเพื่อเปลี่ยนแบตหรือดีบักได้ มีช่องระบายอากาศเล็ก ๆ
สวิตช์เลื่อนเปิด–ปิดเครื่องที่ผนังข้างส้น และ ช่องชาร์จ Micro-USB สำหรับเสียบสายชาร์จแบตเตอรี่ (ผ่านวงจร TP4056)
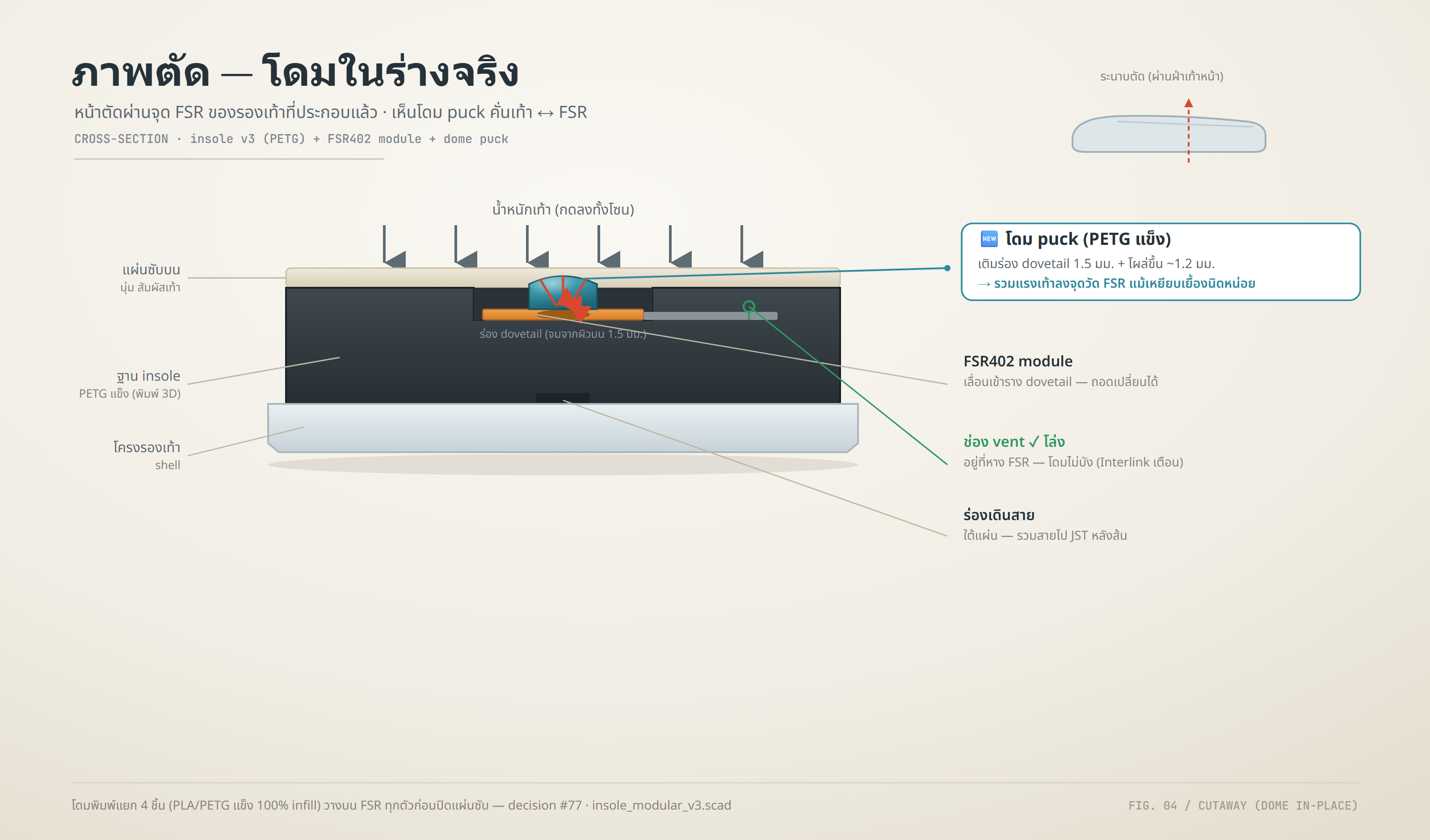
โดมแข็งเล็ก (Ø~11 มม.) พิมพ์ 3D แยก วางบน FSR ทุกตัว เติมร่อง dovetail + โผล่รับแรง — รวมน้ำหนักเท้าลงจุดวัดให้ตรง แม้เหยียบเยื้องนิดหน่อย ค่าจึงนิ่งและแม่นขึ้น
คนเบาหวานปลายประสาทเสื่อม ฝ่าเท้า “ชา” — สัญญาณสัมผัสอ่อนๆ ส่งไม่ถึงสมอง เติมการสั่นเบาจนไม่รู้สึกเข้าไป สัญญาณที่เคยอ่อนเกินจะถูก “ดัน” ทะลุเกณฑ์ขึ้นมารับรู้ได้ → ฝ่าเท้ารับสัมผัสดีขึ้น ทรงตัวดีขึ้น
หลักฐานหลัก: RCT crossover (Diabetes Care 2024) + White noise insole (Nature 2023) ที่ดีไซน์ใกล้ของเราที่สุด (มอเตอร์สั่นใต้ปลายเท้า+ส้น รวมในแผ่นเดียว)